

西门子NCU573.4
6FC5357-0BB34-0AE1SINUMERIK 840D/DE NCU 573.4,650MHz,64MB (不带风扇盒) 不带系统软件 存储器:NC 2.5MB,PLC 96KB PROFIBUS-DP 准备
描述
本条目说明了当每个CPU是在不同的STEP 7项目下组态时,如何将一个CPU 作为从站添加在另一个CPU的 DP 主站系统下。
本例中可看到一个CPU 414-3 DP 被组态为 DP 主站(STEP 7项目1)。一个CPU 315-2 DP 被组态为智能从站(STEP 7项目2),并被添加在CPU 414-3 DP的DP 主站系统下。使用一致性和非一致性数据进行数据交换。
项目 1 包含以下硬件组态。
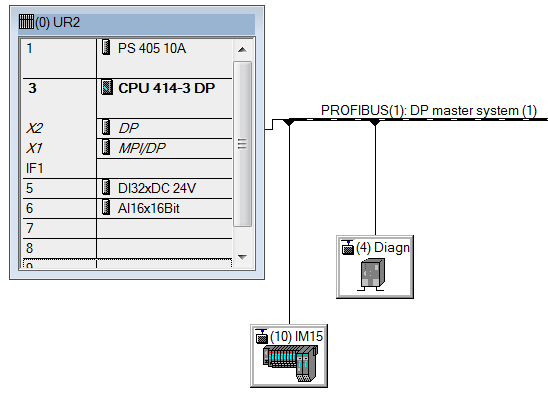
图. 01
项目 2 包含以下硬件组态。
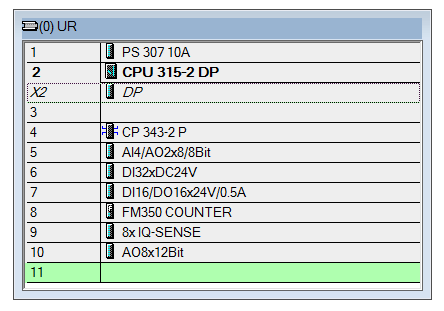
图. 02
将 CPU 315-2 组态为DP 从站
将 CPU 315-2 DP 组态为DP 从站。为此打开 项目2 的硬件组态。
在硬件组态中打开DP 接口的对象属性。在“常规”标签下点击“属性”按钮。打开“属性-PROFIBUS DP接口”对话框。
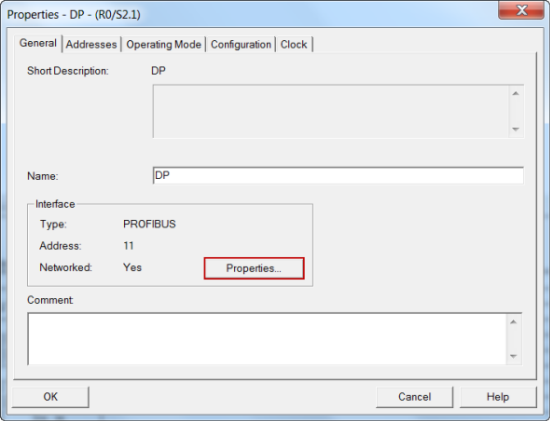
图. 03
3. 将 CPU 315-2 DP 连入PROFIBUS 子网络,并设置 PROFIBUS 地址。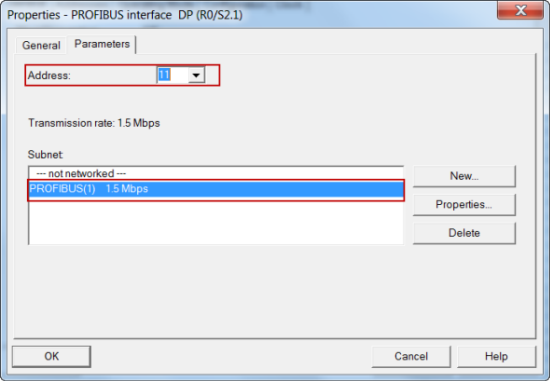
图. 04
4. 在 DP 接口的对象属性中打开“操作模式”标签。选择“DP 从站”作为操作模式。
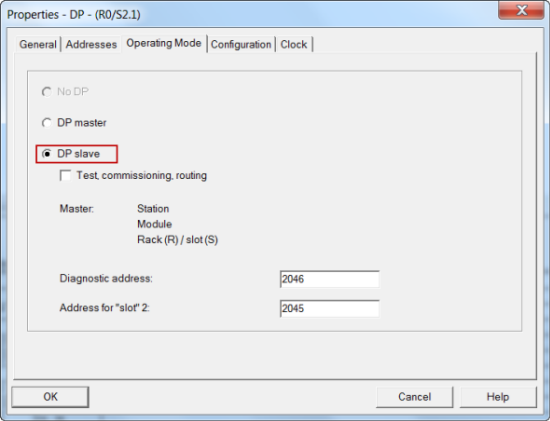 西门子NCU573.4 图. 05
西门子NCU573.4 图. 05
5. 在 DP 接口的对象属性中打开“组态”标签。在这里定义输入输出区域。点击“新建”按钮创建一个新的组态行,在其中指定地址类型、IO地址,以及IO数据的长度、单位和一致性。
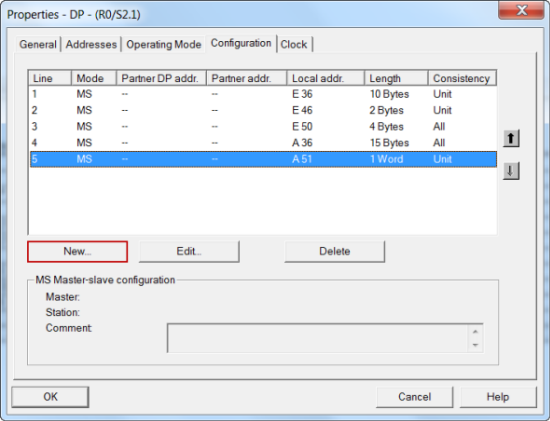
图. 06
注意
为了实现一致性数据传输,需要设置总长度的一致性。为了清楚地区分一致性和非一致性数据,本例中组态了不同的数据区域(参见表 1)。
6. 保存并编译project2。
将CPU 315-2 DP(DP从站)添加到CPU 414-3 DP的DP主站系统中。
1. 在project1中通过GSD文件插入CPU 315-2DP并将其作为DP从站。CPU 315-2DP(订货号:6ES7 315-2AG10-0AB0)的GSD文件位于条目号:113652。
注意事项:
安装GSD文件的说明在条目号:2383630。
2. 安装GSD文件后,可以在“PROFIBUS-DP > Other field devices > PLC > SIMATIC”下的硬件目录中找到CPU 315-2DP。
3. 将在项目1中的CPU添加到CPU 414-3 DP,并设置关联的PROFIBUS地址。
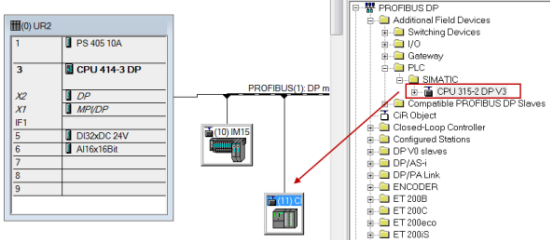
图. 07
4. 当手动合并DP从站时,您应该确保DP从站的总线参数和PROFIBUS地址在项目1和项目2是相同的。
5. 使用PROFIBUS-DP > More field devices > PLC > SIMATIC > CPU 315-2 DP硬件目录下的模块,定义CPU 315-2DP的I/O组态。
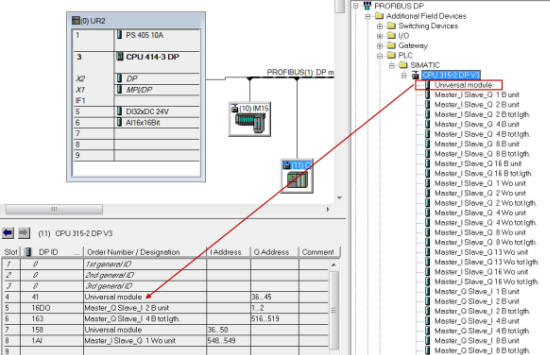
图. 08
6. 两个项目中的I/O数据都必须组态为严格相对。这意味着主站的输出数据变成从站的输入数据,反之亦然(参看表 1)。传送一致性数据需要系统功能SFC 14 / SFC 15 或一个过程映像区(PIP)。
注意事项:
更多关于处理一致数据的信息,可从以下条目获得: 11646774, 245111 和 5116353
7. 保存并编译项目1以及将两个项目加载到相应的CPU上。
| 类型 | 长度 | 一致性 | 类型 | 长度 | 一致性 |
| 输出 | 10 个字节 | 单元 | 输入 | 10 个字节 | 单元 |
| 输出 | 2 个字节 | 单元 | 输入 | 2 个字节 | 单元 |
| 输出 | 4 个字节 | 所有 | 输入 | 4 个字节 | 所有 |
| 输入 | 15个字节 | 所有 | 输出 | 15个字 | 所有 |
| 输入 | 1 个字 | 单元 | 输出 | 1 个字 | 单元 |
表 1
用于组态不同 STEP 7项目中两个 CPU 的主站/从站 连接的步骤可应用于其他 CPU 类型。
在 STEP 7 (TIA Portal)中,需要在CPU属性中使能HSC才能在运动控制对象里选择该硬件接口作为编码器反馈。
配置HSC(高速计数器)作为运动控制中的编码器位置反馈需要以下硬件及软件版本:
CPU 15xxC-1PN 固件版本V2.0 (或更高)
STEP 7(TIA Portal)V14 (或更高)
组态
以下示例描述了如何组态CPU 1512C-1 PN。
在项目概览中右键 CPU 1512C-1 PN 并在 弹出的菜单选择“Properties”
在"General" 选项卡区域,找到高速计数器选项,例如: "High speed counters (HSC) > HSC2".
选择"HSC2 > General" (Fig. 1) 并使能功能: "Activate this high-speed counter".
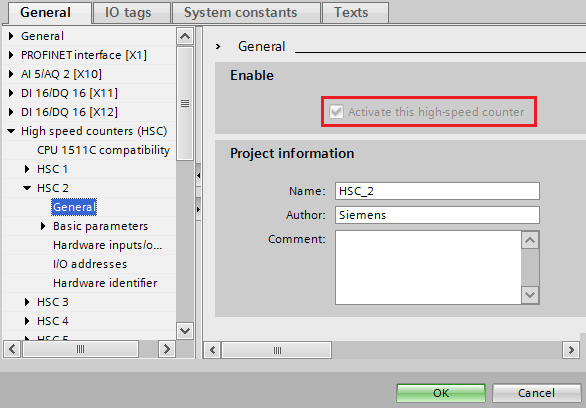
Fig. 1选择"HSC2 > Basic parameters" (Fig. 2) 并使能功能: "Position input for Motion Control"
在"Module parameters"下面选择所使用的编码器类型,例如"Signal type" 和 "Signal evaluation".
点击"OK"关闭对话框.
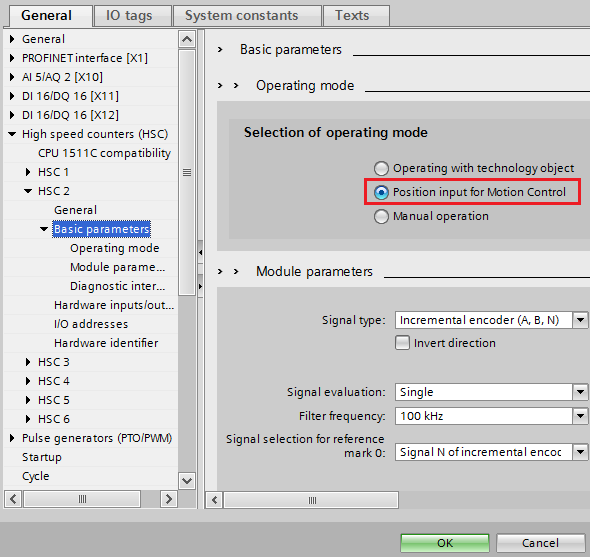
Fig. 2在项目树中打开"Technology objects" ,双击"Add new function" 功能.
点击 "Motion Control" 并选择一个工艺对象, 例如:"TO_PositioningAxis",
点击"OK"确认.在 "Technology Objects"会生成工艺对象"PositioningAxis_1".
在 "Configuration" 对话框进入"Hardware interface > Encoder"文件夹.
组态"HSC_2" 为编码器(as shown in Fig. 3).
点击 OK 图标 (绿色对号).
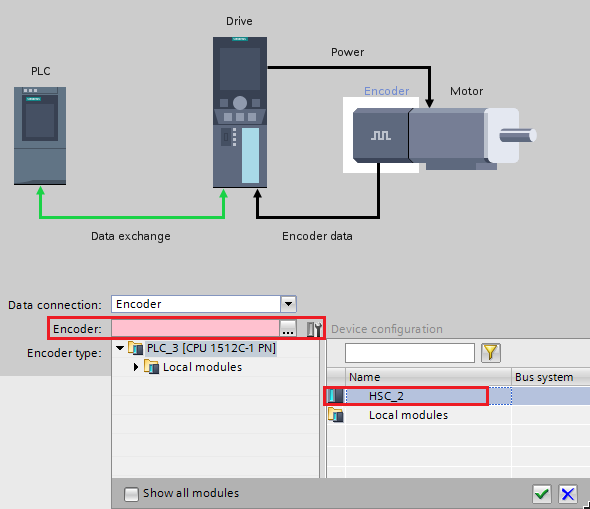
Fig. 3切换至"Hardware interface > Data exchange" 在"Data exchange Encoder" 下选择编码器参数。
完成组态后, 保存并编译PLC站点.
西门子NCU573.4